 ABB-4軸マニピュレータ
ABB-4軸マニピュレータ
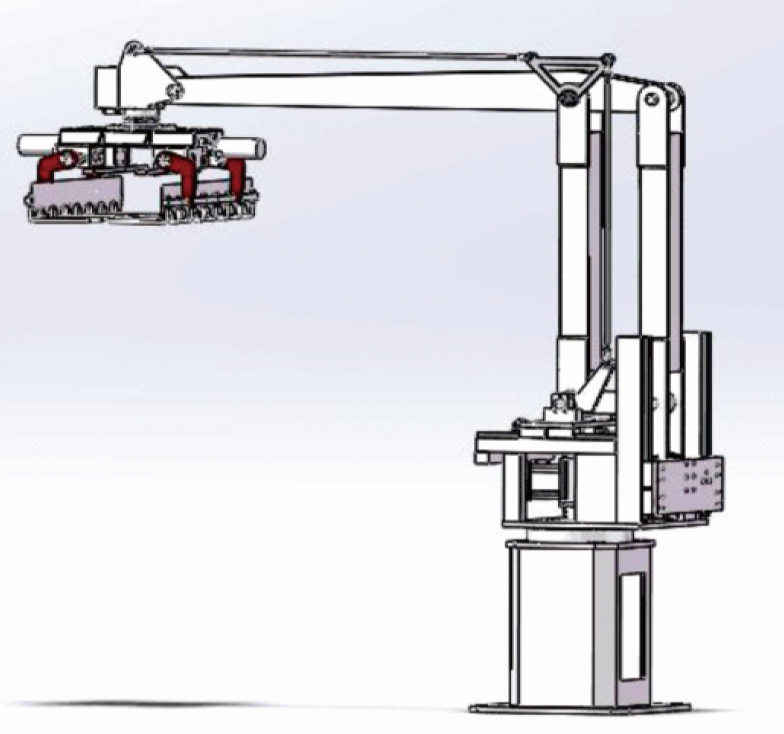
仕様:
| 機械の構造 | 多関節ロボット | |||
| 行動パターン | 空間的 | |||
| パレタイジング可搬量 | 50kg | |||
| 行動軸 | 基本的には4軸 | |||
| 行動範囲 | Z軸 | R軸 | Q軸 | a軸 |
| 2300mm | 1500mm | 330mm | 330mm | |
| グリッパー | 添え闆、フォーク、吸盤とその他の種類 | |||
| 電源 | 380V/50HZ 1.9kw | |||
| 空気圧 | 0.5MPa | |||
| 機械重さ | 1700kg | |||
仕様:
| 機械の構造 | 多関節ロボット | |||
| 行動パターン | 空間的 | |||
| パレタイジング可搬量 | 50kg | |||
| 行動軸 | 基本的には4軸 | |||
| 行動範囲 | Z軸 | R軸 | Q軸 | a軸 |
| 2300mm | 1500mm | 330mm | 330mm | |
| グリッパー | 添え闆、フォーク、吸盤とその他の種類 | |||
| 電源 | 380V/50HZ 1.9kw | |||
| 空気圧 | 0.5MPa | |||
| 機械重さ | 1700kg | |||